Motor de servicio eléctrico de Yaskawa InsB 200V SJME-04AMB41-0Y 400W Motor de servicio industrial
Especificaciones
Corriente: 2.0A
Válvula de voltaje: 200 V
Potencia: 400 W
Torque nominal: 1,27 N-m
Velocidad máxima: 3000 rpm
Codificador: 17 bits Codificador absoluto
Carga de inercia JL kgm2¢ 10-4: 0.026
Eje: recto sin llave
OTROS PRODUCTOS superiores
Motor Yasakawa, conductor SG- Mitsubishi Motor HC-, HA-
Los módulos de Westinghouse 1C, 5X- Emerson VE, KJ-
El motor Honeywell TC, TK-Fanuc A0-
Transmisor Rosemount 3051- Transmisor de Yokogawa EJA-
Persona de contacto: Anna
El correo electrónico: wisdomlongkeji@163.com
Número de teléfono: +0086-13534205279
El SImágenes
Se aplicará el método de clasificación de los productos.
SJDE-02APA: el número de unidades de producción y el número de unidades de producción
Se aplicará el procedimiento de ensayo de la norma ISOFIX.
El número de unidades de la unidad de control de la unidad de control de la unidad de control de la unidad de control de la unidad de control de la unidad de control de la unidad de control.
Se aplicará el procedimiento de ensayo de la SJDE-08APA
Se aplicará el procedimiento siguiente:
Se aplicarán las siguientes medidas:
Se aplicarán las siguientes medidas:
Se aplicarán las siguientes medidas:
El inversor consta de tres unidades de medio puente donde el interruptor superior e inferior se controlan de forma complementaria, lo que significa que cuando se enciende el superior, el inferior debe apagarse,y viceversaComo el tiempo de apagado del dispositivo de alimentación es mayor que el de encendido,Se debe insertar un tiempo muerto entre el momento en que se apaga un transistor del medio puente y se enciende su dispositivo complementario.El voltaje de salida se crea principalmente mediante una técnica de modulación de ancho de pulso (PWM), donde una onda portadora de triángulo isósceles se compara con una onda sinusoidal de modulación de frecuencia fundamental.Los puntos naturales de intersección determinan los puntos de conmutación de los dispositivos de potencia de un inversor de medio puenteEsta técnica se muestra en la Figura 3-6. Las ondas de voltaje de 3 fases se desplazan 120o entre sí y, por lo tanto, se puede suministrar un motor de 3 fases
Los dispositivos de potencia más populares para aplicaciones de control de motores son los MOSFET de potencia y los IGBT.Está diseñado para el funcionamiento de alta frecuencia y tiene una baja caída de voltajeSin embargo, la sensibilidad a la temperatura de saturación limita el uso de los MOSFET en aplicaciones de alta potencia.Un transistor bipolar de puerta aislada (IGBT) es controlado por un MOSFET en su baseEl IGBT requiere baja corriente de accionamiento, tiene un tiempo de conmutación rápido y es adecuado para altas frecuencias de conmutación.causando mayores pérdidas de conducción.

El control vectorial es la técnica de control más popular de los motores de inducción de CA.la expresión para el par electromagnético de la máquina de espacio entre aire liso es similar a la expresión para el par de la máquina de CC excitada por separadoEn el caso de las máquinas de inducción, el control se realiza generalmente en el marco de referencia (d-q) unido al vector de flujo espacial del rotor.Es por eso que la implementación del control de vectores requiere información sobre el módulo y el ángulo espacial (posición) del vector de flujo espacial del rotor.Las corrientes del estator de la máquina de inducción se separan en componentes que producen flujo y par utilizando la transformación al sistema de coordenadas d-q,cuyo eje directo (d) está alineado con el vector del espacio de flujo del rotorEso significa que el componente del eje q del vector de flujo del rotor siempre es cero:

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!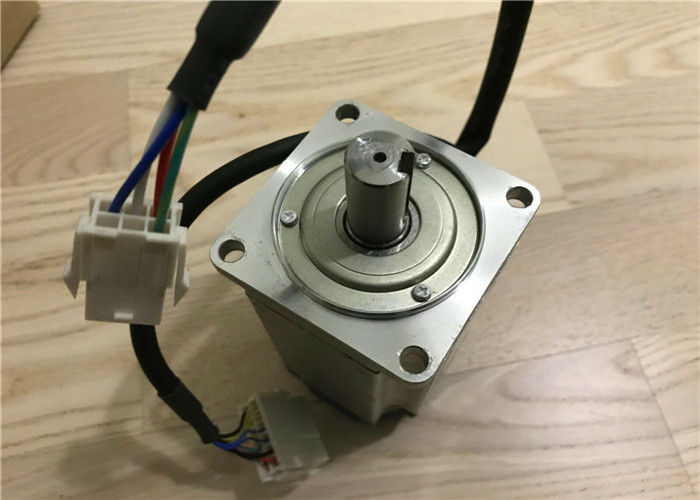
Calificación general
Imagen de calificación
La siguiente es la distribución de todas las calificacionesTodas las reseñas