Servomotor industrial Yaskawa Electric 4500 W 1500 RPM SERVO MOTOR SGMDH-45A2B-YR14
DETALLES RÁPIDOS
Modelo SGMDH-45A2B-YR14
Tipo de producto Servomotor de CA
Salida nominal 4500w
Par nominal 28.4Nm
Velocidad nominal 1500RPM
Tensión de alimentación 200vCA
Corriente nominal 32.4Amps
OTROS PRODUCTOS SUPERIORES
Motor Yasakawa, Driver SG- Motor Mitsubishi HC-,HA-
Módulos Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Motor Fanuc A0-
Transmisor Rosemount 3051- Transmisor Yokogawa EJA-
PRODUCTOS SIMILARES
| SGMDH |
descripción |
fabricante |
| SGMDH-056A2A-YR25 |
SGMDH056A2AYR25 SERVO MOTOR |
yaskawa |
| SGMDH-06A2 |
SGMDH06A2 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-TR25 |
SGMDH06A2ATR25 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR |
SGMDH06A2AYR SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR11 |
SGMDH06A2AYR11 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR12 |
SGMDH06A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR13 |
SGMDH06A2AYR13 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR14 |
SGMDH06A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR24 |
SGMDH06A2AYR24 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR25 |
SGMDH06A2AYR25 SERVO MOTOR |
yaskawa |
| SGMDH-06A2A-YR26 |
SGMDH06A2AYR26 2.63NM 550W 4AMP 2000RPM 200V |
yaskawa |
| SGMDH-12A2 |
SGMDH12A2 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YA14 |
SGMDH12A2AYA14 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR |
SGMDH12A2AYR SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR12 |
SGMDH12A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR13 |
SGMDH12A2AYR13 CA 2000RPM 1150W 200V 7.3AMP 5.49NM |
yaskawa |
| SGMDH-12A2A-YR14 |
SGMDH12A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR15 |
SGMDH12A2AYR15 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YR21 |
SGMDH12A2AYR21 SERVO MOTOR |
yaskawa |
| SGMDH-12A2A-YRA1 |
SGMDH12A2AYRA1 SERVO MOTOR |
yaskawa |
| SGMDH-13A2A-YR23 |
SGMDH13A2AYR23 SERVO MOTOR |
yaskawa |
| SGMDH-20A2A21 |
SGMDH20A2A21 SERVO MOTOR |
yaskawa |
| SGMDH-22A2 |
SGMDH22A2 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR11 |
SGMDH22A2AYR11 SIGMA II 2.2KW L/U AXIS SK45X |
yaskawa |
| SGMDH-22A2A-YR12 |
SGMDH22A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR13 |
SGMDH22A2AYR13 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR13YA |
SGMDH22A2AYR13YA SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR14 |
SGMDH22A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-22A2A-YR32 |
SGMDH22A2AYR32 SERVO MOTOR |
yaskawa |
| SGMDH-22ACA61 |
SGMDH22ACA61 SERVO MOTOR |
yaskawa |
| SGMDH-30A2A-YR31 |
SGMDH30A2AYR31 SERVO MOTOR |
yaskawa |
| SGMDH-30A2A-YR32 |
SGMDH30A2AYR32 SERVO MOTOR |
yaskawa |
| SGMDH-32A2 |
SGMDH32A2 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A |
SGMDH32A2A SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YA14 |
SGMDH32A2AYA14 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR11 |
SGMDH32A2AYR11 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR12 |
SGMDH32A2AYR12 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR13 |
SGMDH32A2AYR13 CA 3.2KW SIGMA 2 S-AXIS |
yaskawa |
| SGMDH-32A2A-YR14 |
SGMDH32A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YR51 |
SGMDH32A2AYR51 SERVO MOTOR |
yaskawa |
| SGMDH-32A2A-YRA1 |
SGMDH32A2AYRA1 SERVO MOTOR |
yaskawa |
| SGMDH-32ACA-MK11 |
SGMDH32ACAMK11 SERVO MOTOR |
yaskawa |
| SGMDH-32P5A |
SGMDH32P5A SERVO MOTOR |
yaskawa |
| SGMDH-40A2 |
SGMDH40A2 SERVO MOTOR |
yaskawa |
| SGMDH-40A2A |
SGMDH40A2A SERVO MOTOR |
yaskawa |
| SGMDH-40ACA21 |
SGMDH40ACA21 SERVO MOTOR |
yaskawa |
| SGMDH-44A2A-YR14 |
SGMDH44A2AYR14 SERVO MOTOR |
yaskawa |
| SGMDH-44A2A-YR15 |
SGMDH44A2AYR15 SERVO MOTOR |
yaskawa |
| SGMDH-45A2A6C |
SGMDH45A2A6C SERVO MOTOR |
yaskawa |
| SGMDH-45A2B61 |
SGMDH45A2B61 SERVO MOTOR |
yaskawa |
| SGMDH-45A2BYR |
SGMDH45A2BYR SERVO MOTOR |
yaskawa |
| SGMDH-45A2B-YR13 |
SGMDH45A2BYR13 SERVO MOTOR |
yaskawa |
| SGMDH-45A2BYR14 |
SGMDH45A2BYR14 SERVO MOTOR |
yaskawa |
| SGMDH-45A2B-YR14 |
SGMDH45A2BYR14 SERVO MOTOR |
yaskawa |
| SGMDH-45A2BYR15 |
SGMDH45A2BYR15 SERVO MOTOR |
yaskawa |
| SGMDH-45A2B-YR15 |
SGMDH45A2BYR15 SERVO MOTOR |
yaskawa |
| SGMDH-6A2A-YR13 |
SGMDH6A2AYR13 SERVO MOTOR |
yaskawa |
| SGMDH-6A2A-YR25 |
SGMDH6A2AYR25 SERVO MOTOR |
yaskawa |
| SGMDH-A2 |
SGMDHA2 SERVO MOTOR |
yaskawa |
| SGMDH-A2A |
SGMDHA2A SERVO MOTOR |
yaskawa |
• Al cerrar el bucle de velocidad, así como el bucle de posición en la computadora, se puede usar un solo dispositivo de retroalimentación para ambos. El enfoque de la computadora por eje es beneficioso si se eligen tasas de actualización muy altas para el bucle de velocidad. Con múltiples ejes, la carga sobre una computadora central puede ser demasiado grande con bucles de velocidad de actualización alta.
• Si se anticipa mucho movimiento coordinado, una computadora central tendría acceso directo a cada eje. Con el enfoque de la computadora por eje, los enlaces de comunicación de computadora a computadora resultan en retrasos que limitan la coordinación cercana. Los bucles de velocidad pueden permanecer analógicos con el enfoque de la computadora central para facilitar esto.
Un diagrama de Bode, como el que se muestra a continuación, ayuda a cuantificar qué tan bien la salida, o retroalimentación (F), sigue al comando (C) al mostrar la relación entre A y la frecuencia de excitación. La frecuencia se expresa normalmente en radianes/seg.(ω) en lugar de ciclos por segundo (f). Dado que ω = 2πf ≈ 6.28 f, es fácil convertir de uno a otro. Además, 1/ω, en segundos, es la constante de tiempo de un filtro de paso bajo con un ancho de banda de f. Una vez que conocemos el ancho de banda (ω) de un servo, conocemos la constante de tiempo del filtro equivalente (1/ω) y, por lo tanto, podemos predecir su respuesta a una entrada escalonada.
¿Para qué son buenos los motores paso a paso?
Posicionamiento – Dado que los motores paso a paso se mueven en pasos precisos y repetibles, sobresalen en aplicaciones que requieren precisión
posicionamiento como impresoras 3D, CNC, plataformas de cámara y trazadores X,Y. Algunas unidades de disco también utilizan motores paso a paso para posicionar el cabezal de lectura/escritura.
Control de velocidad – Los incrementos precisos de movimiento también permiten un excelente control de la velocidad de rotación para
automatización de procesos y robótica.
Par a baja velocidad - Los motores de CC normales no tienen mucho par a bajas velocidades. Un motor paso a paso tiene
par máximo a bajas velocidades, por lo que son una buena opción para aplicaciones que requieren baja velocidad con alta
precisión.
Muchos usuarios del control de movimiento han escuchado a los proveedores tratar de explicar ciertas características del servo utilizando diagramas de Bode. Es necesario comprenderlos para tratar con el movimiento. Para empezar, la pronunciación correcta es "Bo-dee". Solo piensa en Bo Derek (lo cual no es difícil de hacer). Encontrarás otras similitudes entre los dos (¿a quién estoy engañando?) como el número 10, como se verá.

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!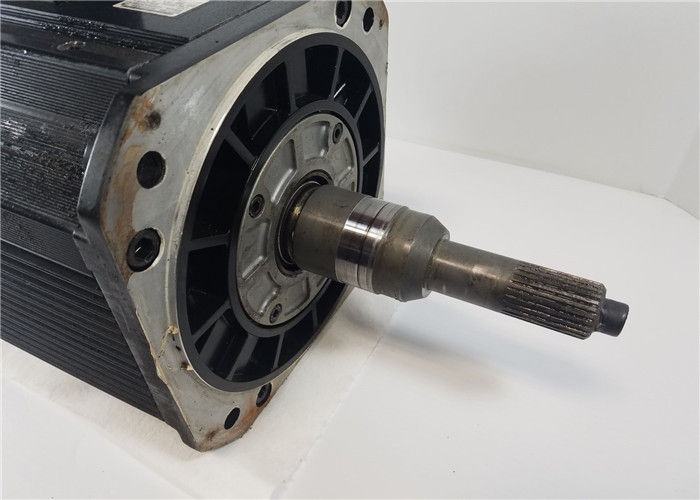
Calificación general
Imagen de calificación
La siguiente es la distribución de todas las calificacionesTodas las reseñas