SGMDH Sigma II Japón YASKAWA 15.3N-m SERVO MOTOR 3200W SGMDH-32A2A-YR14
Especificaciones
Modelo SGMDH-32A2A-YR14
Tipo de producto Servomotor de CA
Salida nominal 200w
Par nominal 15.3 Nm
Velocidad nominal 2000RPM
Voltaje de alimentación 200vCA
Corriente nominal 20.9Amperios
OTROS PRODUCTOS SUPERIORES
Motor Yasakawa, Driver SG- Motor Mitsubishi HC-,HA-
Módulos Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Motor Fanuc A0-
Transmisor Rosemount 3051- Transmisor Yokogawa EJA-
SProductos Similares
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
La presencia de este material de alta permeabilidad hace que el flujo magnético se confine en su mayor parte a los caminos definidos por la estructura del estator, de la misma manera que las corrientes se confinan a los conductores de un circuito electrónico. Esto sirve para concentrar el flujo en los polos del estator. El
Figura 4. Principio de un motor de imán de disco desarrollado por Portescap.= N N N N S S S 3
Figura 5. Trayectoria del flujo magnético a través de un motor paso a paso de dos polos con un desfase entre el rotor y el estator.
Figura 6. Motores paso a paso con bobinado unipolar y bipolar. El par de salida producido por el motor es proporcional a la intensidad del flujo magnético generado cuando se energiza el bobinado.
La relación básica que define la intensidad del flujo magnético se define por:
H = (N × i) ÷ l donde:
N = El número de vueltas del bobinado
i = corriente
H = Intensidad del campo magnético
l = Longitud del camino del flujo magnético
Esta relación muestra que la intensidad del flujo magnético y, en consecuencia, el par es proporcional a
el número de vueltas del bobinado y la corriente e inversamente proporcional a la longitud del camino del flujo magnético.
A partir de esta relación básica, se puede ver que un motor paso a paso del mismo tamaño de bastidor podría tener capacidades de salida de par muy diferentes simplemente cambiando los parámetros del bobinado. Se puede encontrar información más detallada sobre cómo los parámetros del bobinado afectan la capacidad de salida del motor en la nota de aplicación titulada “Fundamentos del circuito de accionamiento”.
A diferencia de los motores de CC, con los servomotores se puede posicionar el eje del motor en una posición específica (ángulo) utilizando una señal de control. El eje del motor se mantendrá en esta posición siempre que la señal de control no cambie. Esto es muy útil para controlar brazos robóticos, superficies de control de aviones no tripulados o cualquier objeto que desee que se mueva en un cierto ángulo y permanezca en su nueva posición.
Los servomotores pueden clasificarse según el tamaño o el par que pueden soportar en mini, estándar y gigantes. Por lo general, los servomotores de tamaño mini y estándar pueden ser alimentados directamente por Arduino sin necesidad de una fuente de alimentación o controlador externo.
Por lo general, los servomotores vienen con brazos (metálicos o plásticos) que están conectados al objeto que se requiere mover (ver la figura a la derecha).
El tercer pin acepta la señal de control, que es una señal de modulación por ancho de pulso (PWM). Puede ser producido fácilmente por todos los microcontroladores y la placa Arduino.
Esto acepta la señal de su controlador que le indica a qué ángulo girar. La señal de control es bastante simple en comparación con la de un motor paso a paso. Es solo un pulso de diferentes longitudes. La longitud del pulso corresponde al ángulo al que gira el motor.
Diagrama de bloques de control de servomotores
Una señal de pulso que se aplica externamente (cuando es del tipo de entrada de pulso) y la rotación detectada por el codificador del servomotor se cuentan, y la diferencia (desviación) se envía a la unidad de control de velocidad. Este contador se conoce como el contador de desviación.
Durante la rotación del motor, se genera un pulso acumulado (desviación de posicionamiento) en el contador de desviación y se controla para que vaya a cero.
La función para mantener la posición actual (mantenimiento de la posición mediante control servo) se logra con un bucle de posición (contador de desviación).

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!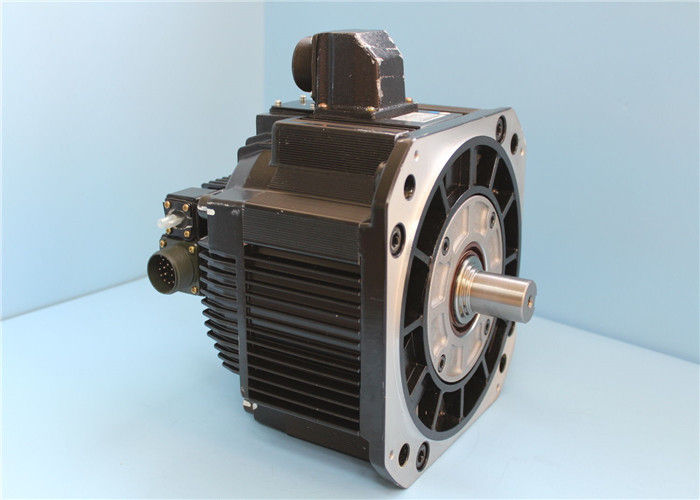
Calificación general
Imagen de calificación
La siguiente es la distribución de todas las calificacionesTodas las reseñas