Sigma industrial de Yaskawa MOTOR SERVO SGMPH-01A1A41 de la CA 2 nuevo 100W de la serie
DESCRIPCIÓN
- Yaskawa eléctrico
- Motor servo de la CA
- Sigma 2 (series de Σ-II)
SEPCIFICATIONS
| Fabricante |
Yaskawa/MagneTek/Saftronics/Omron |
| Serie |
Sigma 2 (series de Σ-II) |
| Peso |
5KG |
PRODUCTOS SIMILARES
| SGMPH-02A1A-YR12 |
SGMPH-02A1A-YR21 |
| SGMPH-02A1A-YR31 |
SGMPH-02A1A-YR32 |
| SGMPH-02A2A-YR12 |
SGMPH-02A2A-YR21 |
| SGMPH-02AAA2B |
SGMPH-02AAA2C |
| SGMPH-02AAA2E |
SGMPH-02AAA2E |
| SGMPH-02AAA4B |
SGMPH-02AAA61 |
| SGMPH-02BAA21 |
SGMPH-02BAA41 |
| SGMPH-04A1A21 |
SGMPH-02BAAG161 |
| SGMPH-04A1A2B |
SGMPH-04A1A2C |
| SGMPH-04A1A41 |
SGMPH-04A1A4B |
Persona de contacto: Ana
Email: wisdomlongkeji@163.com
Teléfono móvil: +0086-13534205279
OTROS PRODUCTOS SUPERIORES
| Motor de Yasakawa, SG del conductor |
Motor HC-, ha de Mitsubishi |
| Módulos 1C-, 5X- de Westinghouse |
Emerson VE, KJ |
| Honeywell TC, TK |
Módulos IC de GE - |
| Motor A0- de Fanuc |
Transmisor EJA- de Yokogawa |
La presencia de este alto material de la permeabilidad hace el flujo magnético ser confinada en general a las trayectorias definido por la estructura del estator como las corrientes se confinan a los conductores de un circuito electrónico. Esto sirve concentrar el flujo en los polos del estator.
Figura el principio 4. de un motor del imán del disco desarrollado por Portescap.= N N N N S S S 3
Cuadro 5. trayectoria del flujo magnético a través de un motor de pasos del dos-polo con un retraso entre el rotor y el estator.
Cuadro motores de pasos de la herida unipolar y bipolar de 6. la salida del esfuerzo de torsión producida por el motor es proporcional a la intensidad del flujo magnético generado cuando se activa la bobina.
La relación básica que define la intensidad del flujo magnético se define cerca:
H = (× i de N) ÷ l dónde:
N = el número de vueltas de enrrollamiento
i = actual
H = intensidad del campo magnético
l = longitud de trayectoria del flujo magnético
Esta relación muestra que la intensidad del flujo magnético y por lo tanto el esfuerzo de torsión es proporcional a
el número de vueltas de enrrollamiento y del actual e inverso proporcional a la longitud de la trayectoria del flujo magnético.
De esta relación básica una puede ver que el mismo motor de pasos del tamaño de marco podría tener capacidades muy diversas de la salida del esfuerzo de torsión simplemente cambiando los parámetros de enrrollamiento. Una información más detallada sobre cómo los parámetros de enrrollamiento afectar a la capacidad de la salida del motor se pueden encontrar en la nota de uso titulada “los fundamentos del circuito de impulsión”.
Elementos de configuración
(a) el regulador de The del regulador es el anfitrión de la red de SynqNet. Debe solamente haber un regulador por red.
(b) los nodos un nodo son un esclavo y no el regulador, salvo que se indique lo contrario.
(c) adaptador un conector opcional del loopback colocado en el extremo de una cadena del nodo en una topología de la secuencia.
Topología
SynqNet apoya una topología del anillo donde los nodos de red están conectados en serie de nuevo al regulador de SynqNet. En una topología del anillo, si cualquier un cable o nodo falla, la red reorientará datos de paquete alrededor de la rotura y notificará el uso con un acontecimiento. La ubicación de la rotura se puede determinar por el uso.
La topología de la secuencia (abierta o terminada) también se apoya donde los nodos de red no están conectados de nuevo al regulador de SynqNet. Si un cable se rompe, los nodos rio abajo de la rotura serán no más enviar capaz/recibir los paquetes a/desde el regulador. La ventaja de usar un adaptador en el nodo pasado es que el tiempo de la inicialización de la red está reducido, porque el regulador puede determinista encontrar el nodo pasado en una red. Ambos tipos de la topología de la secuencia no apoyan la recuperación de falta.
Las respuestas cíclicas todas las respuestas cíclicas se reciben cada ciclo de control y están disponibles en el almacenador intermediario de la respuesta del nodo.
(1) demostraciones listas de la impulsión que las comunicaciones son activas. Válido siempre.
(2) demostraciones listas del codificador que el codificador serial está comunicando correctamente en modo síncrono. Válido cuando aparece la respuesta lista de la impulsión.
(3) el amperio accionó demostraciones que el voltaje del motor está disponible conducir el servo. Válido cuando aparece la respuesta lista de la impulsión.
(4) servo EN demostraciones que el servo es permitido o discapacitado. No será fijado si la impulsión es discapacitada tampoco dando vuelta al PWM o por del frenado dinámico. Válido cuando la impulsión alista se fija.
(5) el límite del esfuerzo de torsión muestra que la referencia del esfuerzo de torsión está sobre el límite del esfuerzo de torsión. Válido cuando aparece la respuesta lista de la impulsión.
(6) la advertencia advierte que las precauciones se deban tomar para prevenir una falta o un error. Válido siempre.
(7) la falta muestra que una falta ha cerrado el amplificador. Para determinar la causa de la falta, el código de error necesita ser leído usando una operación de memoria. Válido siempre.
(8) la reacción de la posición vuelve un valor de 32 bits de la posición en cada ciclo de control.
(9) Monitor_A/esfuerzo de torsión Echo Shows que el valor de esfuerzo de torsión en cada ciclo de control está vuelto.
(10) Monitor_C/los datos de varias espiras vuelve un valor de datos de varias espiras de 16 bits.


 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!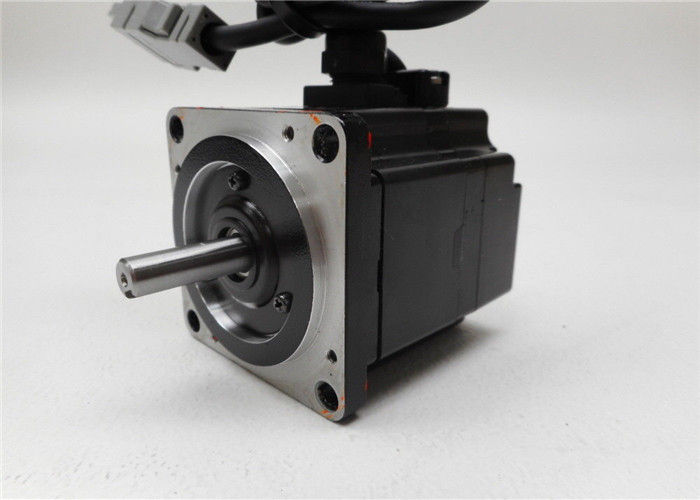
Calificación general
Imagen de calificación
La siguiente es la distribución de todas las calificacionesTodas las reseñas