YASKAWA SGMAH Sigma II 0.91A 100W MOTOR AC SERVO 3000RMP SGMAH-01AAA41-Y1
Especificaciones
Fabricante: Yaskawa
Número de producto: SGMAH-01AAA41-Y1
Descripción: SGMAH-01AAA41-Y1 es un servomotor de CA fabricado por Yaskawa
Tipo de servomotor: SGMAH Sigma II
Salida nominal: 10W (0.07HP)
Fuente de alimentación: 200V
Especificaciones del codificador: Codificador incremental de 13 bits (2048 x 4); Estándar
Nivel de revisión: Estándar
Especificaciones del eje: Eje recto sin chavetero
Accesorios: Estándar; sin freno
Opción: Ninguna
Tipo: ninguno
OTROS PRODUCTOS SUPERIORES
Motor Yasakawa, Driver SG- Motor Mitsubishi HC-,HA-
Módulos Westinghouse 1C-,5X- Emerson VE-,KJ-
Honeywell TC-,TK- Motor Fanuc A0-
Transmisor Rosemount 3051- Transmisor Yokogawa EJA-
SProductos Similares
SGMAH-A5A1A21
SGMAH-A5A1A2C
SGMAH-A5A1A2E
SGMAH-A5A1A41D
SGMAH-A5A1A4C
SGMAH-A5A1A-YR11
SGMAH-A5A1A-YR31
SGMAH-A5A1F21
SGMAH-A5A1F2C
SGMAH-A5A1F2CD
SGMAH-A5A1F41
SGMAH-A5A4F41
SGMAH-A5AAA21
SGMAH-A5AAA2B
SGMAH-A5AAA61D
SGMAH-A5AAA61D-OY
SGMAH-A5AAAG161
SGMAH-A5AAAG761
SGMAH-A5AAAG761D
SGMAH-A5AAAH161
Los motores paso a paso a menudo pueden exhibir un fenómeno conocido como resonancia a ciertas velocidades de paso. Esto puede verse como una pérdida repentina o una caída de par a ciertas velocidades, lo que puede resultar en pasos perdidos o pérdida de sincronismo. Ocurre cuando la velocidad de los pulsos de paso de entrada coincide con la frecuencia de oscilación natural del rotor. A menudo, hay un área de resonancia alrededor de la región de 100 – 200 pps y también una en la región de alta velocidad de pulsos de paso. El fenómeno de resonancia de un motor paso a paso proviene de su construcción básica y, por lo tanto,
no es posible eliminarlo por completo. También depende de las condiciones de carga. Se puede reducir
accionando el motor en modos de medio paso o micropasos.
Cuando se aplica un pulso de paso a un motor paso a paso, el rotor se comporta de la manera definida por la curva anterior.
El tiempo de paso t es el tiempo que tarda el eje del motor en girar un ángulo de paso una vez que se aplica el primer pulso de paso.
Este tiempo de paso depende en gran medida de la relación entre el par y la inercia (carga), así como del tipo de controlador utilizado.
Dado que el par es una función del desplazamiento, se deduce que la aceleración también lo será. Por lo tanto, al moverse en grandes incrementos de paso, se desarrolla un alto par y, en consecuencia, una alta aceleración. Esto puede causar sobretiros y timbres como se muestra. El tiempo de asentamiento T es el tiempo que tardan estas oscilaciones o timbres en cesar. En ciertas aplicaciones, este fenómeno puede ser indeseable. Es posible reducir o eliminar este comportamiento mediante micropasos del motor paso a paso. Para obtener más información sobre los micropasos, consulte la nota sobre micropasos.


 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!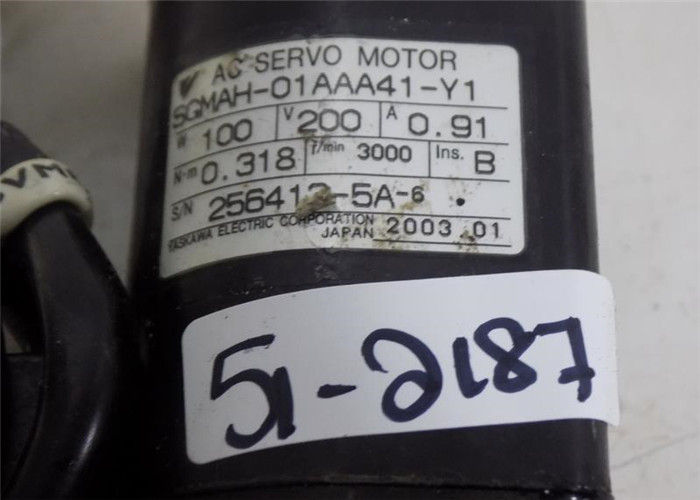
Calificación general
Imagen de calificación
La siguiente es la distribución de todas las calificacionesTodas las reseñas