Servo motor industrial nuevo SGMPH-02AAA21 Yaskawa Electric Japón Sigma 2 (Serie Σ-II)
Descripción
- Yaskawa eléctrica
- Servo motor de cambio
- Sigma 2 (serie Σ-II)
Las especificaciones
| Fabricante |
Yaskawa / MagneTek / Saftronics / Omron. |
| Serie |
Sigma 2 (serie Σ-II) |
| Peso |
10 KG |
Elementos de configuración
(a) Controlador El controlador es el host de la red SynqNet.
(b) Nodos Un nodo es un esclavo y no el controlador, a menos que se indique lo contrario.
(c) Terminador Un conector de loopback opcional colocado al final de una cadena de nodos en una topología de cadena.
Topología
SynqNet admite una topología de anillo donde los nodos de red están conectados en serie al controlador SynqNet.La red redirigirá los datos de paquetes alrededor de la pausa y notificará a la aplicación con un eventoLa ubicación de la ruptura puede determinarse por la aplicación.
La topología de cadena (abierta o terminada) también se admite cuando los nodos de red no están conectados al controlador SynqNet.los nodos aguas abajo de la ruptura ya no podrán enviar/recibir paquetes hacia/desde el controladorLa ventaja de usar un terminador en el último nodo es que el tiempo de inicialización de la red se reduce, porque el controlador puede encontrar determinísticamente el último nodo en una red.Ambos tipos de topología de cadenas no admiten la recuperación de fallas.
Respuestas cíclicas Todas las respuestas cíclicas se reciben cada ciclo de control y están disponibles en el búfer de respuesta del nodo.
(1) Dispositivo listo Muestra que las comunicaciones están activas.
(2) Encoder Ready Indica que el codificador serial se está comunicando correctamente en modo síncrono.
(3) Amp Powered Indica que el voltaje del motor está disponible para conducir el servo.
(4) Servo ON Indica que el servo está activado o desactivado. No se establecerá si el accionamiento está desactivado ya sea apagando el PWM o frenando dinámicamente.
(5) Límites de par Indica que el par de referencia está por encima del límite de par.
(6) Advertencia Advertencia de que deben tomarse precauciones para evitar una falla o un error.
(7) Error Indica que un fallo ha apagado el amplificador. Para determinar la causa del fallo, el código de error debe leerse utilizando una operación de memoria.
(8) Retorno de posición Devuelve un valor de posición de 32 bits en cada ciclo de control.
(9) Monitor_A / Torque Echo Muestra que se devuelve el valor del par en cada ciclo de control.
(10) Monitor_C / Datos de múltiples vueltas Devuelve un valor de datos de múltiples vueltas de 16 bits.

OTROS PRODUCTOS superiores
| Motor Yasakawa, conductor SG- |
Mitsubishi Motor HC, HA- |
| Los módulos de Westinghouse 1C, 5X- |
Emerson VE, KJ- |
| Honeywell TC, TK... |
Los módulos de GE IC - |
| Motor de aire acondicionado A0 |
El transmisor de Yokogawa EJA... |
Productos similares
| El número de unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad. |
El número de unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad. |
| Se aplicará a los vehículos de las categorías M1 y M2. |
El número de unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad. |
| El número de unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad. |
El número de unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad de las unidades de seguridad. |
| Se trata de un sistema de control de las emisiones. |
Se trata de un sistema de control de las emisiones de gases de escape. |
| Se trata de un sistema de control de las emisiones. |
Se trata de un sistema de control de las emisiones. |
| Se trata de un sistema de control de las emisiones. |
Se trata de un sistema de control de las emisiones. |
| Se aplicará el procedimiento de clasificación de los productos. |
Se aplicará el procedimiento de clasificación de los productos. |
| Se aplicará a los vehículos de las categorías M1 y M2. |
Se trata de un sistema de control de las emisiones de gases de escape. |
| El objetivo de la presente Directiva es: |
Se aplicará el procedimiento de clasificación de los productos. |
| Se aplicará el procedimiento siguiente: |
Se aplicará el procedimiento de clasificación de los productos de los Estados miembros. |

 ¡Su mensaje debe tener entre 20 y 3.000 caracteres!
¡Su mensaje debe tener entre 20 y 3.000 caracteres!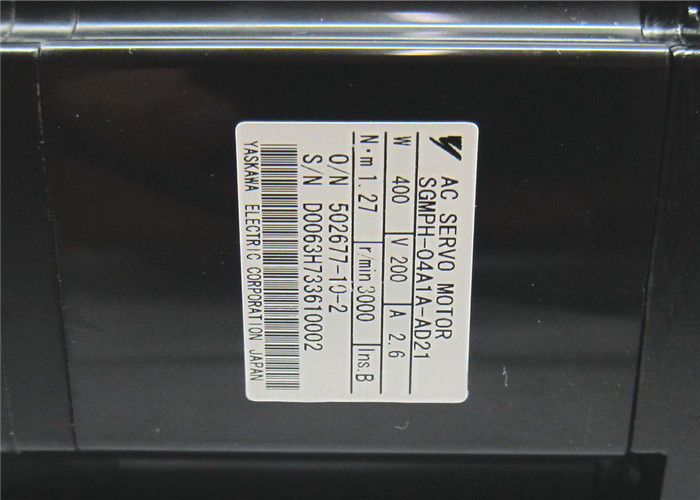
Calificación general
Imagen de calificación
La siguiente es la distribución de todas las calificacionesTodas las reseñas